2025年7月26日至27日,第十届国际交通安全学术研讨会在同济大学顺利召开。本届研讨会由同济大学主办,联合海外华人交通协会(COTA)、上海市交通工程学会、上海市交通委科技委、中国公路学会、《中国公路学报》、智能网联交通系统安全“一带一路”国际联合实验室、中英自动驾驶交通安全联合实验室共同组织,由世界交通运输大会安全与应急学部、浙江警察学院、昆明理工大学协办。本届研讨会的主题为“数智赋能交通安全:联结数据、战略与实践”,18位国内外道路交通安全专家进行演讲,12位研究生进行论文展示,近150位来自政府部门、科研机构、高校及企业的代表参会交流。
本届研讨会依托交通安全学科创新引智基地,围绕交通系统“人-车-路-管理”的核心安全问题与改善的先进研究成果和实践经验,探索了面向零死亡愿景的交通安全治理、人工智能赋能道路交通安全、面向自动驾驶的道路交通安全等方面研究与应用。通过推动多学科交叉、中外经验借鉴与多部门协同治理,会议旨在为国际交通安全治理提供理论支持与实践路径。

第十届国际交通安全学术研讨会参会嘉宾合影
同济大学交通学院党委书记马万经教授主持会议开幕式。同济大学教授、上海市交通工程学会理事长方守恩致欢迎辞,系统介绍了学校发展现状、交通安全学科建设现状及重点成果,回顾了从2010年研讨会发起以来的历届会议的发展历程,肯定其对学术交流与合作的推动作用。辛辛那提大学魏恒教授代表COTA进行开幕致辞,对前来参会的海内外专家表示热烈欢迎。

同济大学交通学院党委书记马万经教授主持会议开幕式

同济大学教授、上海市交通工程学会理事长方守恩致辞

辛辛那提大学魏恒教授致辞

辛辛那提大学魏恒教授等专家代表海外华人交通协会赠送纪念品
7月26日上午,美国亚特兰大市交通局局长、ASCE候任主席、美国国家工程院院士MarshaAnderson Bomar、纽约大学坦登工学院副院长LindaNg Boyle教授、肯塔基大学ReginaldRoy Souleyrette教授、南佛罗里达大学陈聪研究员、肯塔基大学研究工程师王滕博士、同济大学研究生张学宇和雷逸霄分别进行演讲。
美国亚特兰大市交通局局长、ASCE候任主席、美国国家工程院院士MarshaAndersonBomar围绕“通过零死亡愿景项目推动交通安全优先发展”,介绍了“零死亡愿景”的交通安全理念,探讨多个实施措施与政策的城市案例并分析其有效性,介绍了实现“零愿景”目标需要完成的工作,包括行人信号控制,非机动车防护设施,以及学校区域限速策略等安全措施与政策。

美国亚特兰大市交通局局长、ASCE候任主席、美国国家工程院院士MarshaAnderson Bomar演讲
纽约大学坦登工学院副院长LindaNgBoyle教授围绕“自动驾驶行驶中的未来工作方式”发表演讲,针对人类驾驶员在自动驾驶汽车中参加远程在线会议现象的普及,探讨了自动驾驶汽车行驶中虚拟会议对驾驶人接管的影响,分析了自动驾驶汽车行驶中虚拟会议与行驶安全的关系。

纽约大学坦登工学院研究副院长LindaNg Boyle教授演讲
肯塔基大学ReginaldRoySouleyrette教授围绕“自行车、行人和完整街道——面向项目优先级的安全评估”,探讨了步行和自行车基础设施及其他“完整街道”组件带来的潜在效益,并估算了相关基础设施改善的经济价值。

肯塔基大学ReginaldRoy Souleyrette教授演讲
南佛罗里达大学陈聪研究员围绕“标线边缘正弦型隆声带对交通事故预防和降噪的效果评估:美国佛罗里达州‘零死亡愿景’研究”发表演讲,介绍了一种新型的听觉震动处理改善措施——正弦波减速带,并评估了其在解决外部噪音问题及降低车道偏离事故的效果。

南佛罗里达大学陈聪研究员演讲
肯塔基大学研究工程师王滕博士针对“融合事故严重程度以优化公路安全项目优先级”,介绍了一种为州交通部项目优先级排序流程开发的全新安全评分方法。该方法考虑了事故严重程度,并同时采用经验贝叶斯估计值与预期事故超额量指标。

肯塔基大学研究工程师王滕博士演讲
同济大学张学宇博士研究生围绕“宏观交通安全分析与应用”发表演讲,介绍了一种新型的四象限区域交通安全分析方法,分析了交通事故与违法、交通事故与涉事人员的关系,基于四象限法判别的典型区域,提出了面向道路设施、勤务管理、宣传教育等重点问题的安全改善对策。

同济大学张学宇博士研究生演讲
同济大学雷逸霄硕士研究生围绕“上海交通大整治安全改善效果评估”发表演讲,评估了交通大整治政策对交通事故与违法的影响,揭示了违法的政策干预如何影响交通事故,分析了纠正交叉口违法的有效性,有助于确定此类违法是否应成为执法重点。

同济大学雷逸霄硕士研究生演讲
7月26日下午,辛辛那提大学魏恒教授、俄勒冈州立大学王海忠教授、麦吉尔大学孙立君副教授、澳门大学李振宁助理教授、交通运输部公路科学研究院矫成武研究员、全球健康倡导组织(GHAI)道路安全项目官员牛帅帅、同济大学交通学院傅挺副教授分别进行演讲。
辛辛那提大学魏恒教授分享了“专家-AI交互式交通事故成因分析方法论:由表及里的认知逻辑”,聚焦于高风险场景中复杂交通行为带来的安全挑战,提出利用轨迹数据与机器学习方法提升冲突识别准确性,探究了专家判断在数据不完整或因果变量缺失时的重要性,最终提出一套集成传统因果推断与AI的分析框架。

辛辛那提大学魏恒教授演讲
俄勒冈州立大学王海忠教授围绕“基于大语言模型的美国俄勒冈州公众对测速摄像头的认知与接受度评估”发表演讲,分析了测速摄像头在施工区、学校周边及警力薄弱区域的设置,以及由此引发的公平性问题,提出结合问卷调查与AI分析方法,识别公众偏好与潜在担忧,为交通执法政策的科学制定与公平性考量提供了数据支持。
俄勒冈州立大学王海忠教授演讲
麦吉尔大学孙立君副教授围绕“从街景到城市科学:利用多模态大语言模型解析道路安全因素”发表演讲,提出了UrbanX框架,结合多模态大模型与统计建模,自动识别关键安全因素,并准确还原城市中的事故风险分布,展示了人机协作进行城市研究的新范式。
麦吉尔大学孙立君副教授演讲
澳门大学李振宁助理教授围绕“何时、何地、何因?基于大语言模型的交通事故预测”,提出融合视频理解与语言模型的视觉-语言框架,利用大模型的推理能力捕捉事故背后的因果关系,并验证该方法在多个驾驶场景中提升了预测准确性与可解释性。

澳门大学李振宁助理教授演讲
交通运输部公路科学研究院矫成武研究员围绕“基于多周期监测与评估的道路运输驾驶员安全管理技术与系统”发表演讲,针对驾驶员上岗前、作业中状态监测及风险防控场景,提出构建“两级指标+多特征+一报告”的快速智能评估技术,打造涵盖多环节监测评估的管理系统,以科技手段提升驾驶员安全管理精准性与有效性。

交通运输部公路科学研究院矫成武研究员演讲
全球健康倡导组织(GHAI)道路安全项目官员牛帅帅女士围绕“通过强制头盔法提升交通安全:以电动自行车立法为例”演讲,针对电动自行车事故高发、伤亡率高且颅脑损伤为主要致死原因的现状,介绍立法实践与头盔合规率成果,剖析法规推进挑战与纳入修法等机遇。

全球健康倡导组织(GHAI)道路安全项目官员牛帅帅演讲
同济大学傅挺副教授围绕“人工智能在公安交管业务中的典型应用及展望”发表演讲,聚焦交通事故责任认定场景,介绍基于LLM模型的处理流程,展示AI助力精准定责的实践,为交管业务智能化升级提供思路。

同济大学傅挺副教授演讲
会议茶歇期间,同济大学研究生鲍彦莅、吴梦娇、叶斯哈提、周妍汝、戴秉佑、黄子源和浙江警察学院陈锦楚进行了论文海报展示,并与参会嘉宾作介绍交流。
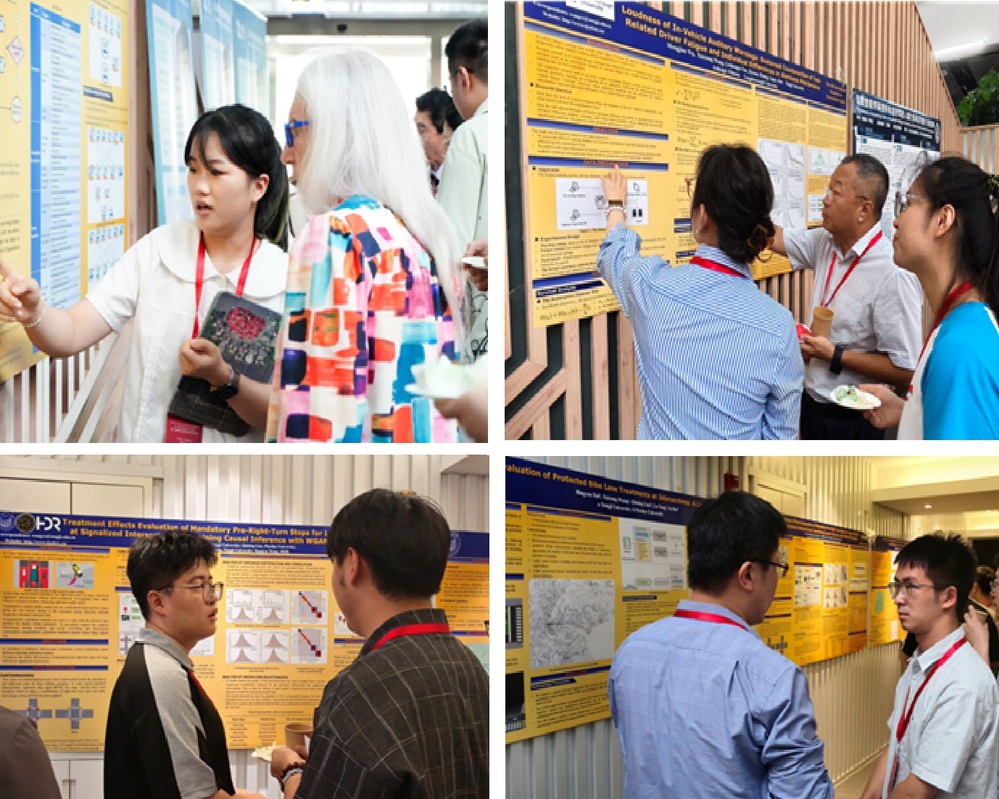
研究生论文海报展示
下午议程结束后,参会专家前往道路与交通工程教育部重点实验室参观,王雪松教授围绕同济大学八自由度驾驶模拟器、交通行为研究与改善、车辆主动安全与自动驾驶、道路设计安全评估与优化、基于信息化的交通安全管理介绍实验室建设与成果。专家们对科研设备及成果给予了高度评价,并表达了积极推动后续合作的意愿。此次实地参观不仅深化了双方交流,也为未来在交通安全领域的协同发展奠定了坚实基础。

参观道路与交通工程教育部重点实验室
7月28日上午,公安部交通管理科学研究所陆文杰副研究员、东南大学朱美新教授、福州大学林薇博士后研究员、同济大学余荣杰教授、陈君毅博士、岳李圣飒副教授、叶欣辰博士、刘倩博士、石若琳博士研究生分别进行演讲。
公安部交通管理科学研究所陆文杰副研究员围绕“面向智能网联汽车的道路交通安全管理对策”,介绍了行业发展趋势、法规体系建设、自动驾驶管理对策及辅助驾驶测试实践,针对部门协同不足、监管缺位及执法能力有限等问题提出了解决思路,强调了当前自动驾驶管理政策的完善方向。

公安部交通管理科学研究所陆文杰副研究员演讲
同济大学余荣杰教授以“自动驾驶汽车交规符合性测评”为题,介绍了基于交通法律知识库、场景还原与行为限制提取的交规符合性测试系统,并展示了虚拟现实仿真测试平台在现实测试与评估中的应用。

同济大学余荣杰教授演讲
东南大学朱美新教授围绕“面向自动驾驶的大语言模型:行为建模与规划”,分享了基于大语言模型的学习型行为建模框架、自动化奖励函数设计方法,以及视觉语言模型在驾驶规划中的应用,展望了具身智能、扩散式运动规划等未来发展趋势。

东南大学朱美新教授演讲
同济大学陈君毅博士针对“面向自动驾驶仿真测试的两轮车驾驶行为模型”发表演讲,提出了改进的社会力模型(ISFM4Sim),能够在交叉口等复杂场景下准确刻画两轮车驾驶行为,并验证了模型在双向交互中的有效性。

同济大学陈君毅博士演讲
同济大学岳李圣飒副教授围绕“基于偏好强化学习的自动驾驶车辆动态接管请求策略”,提出了结合偏好强化学习和QN-MHP网络的动态接管请求策略,有效提升了接管请求时的响应效率。
同济大学岳李圣飒副教授演讲
福州大学林薇博士后研究员分享了“智能网联汽车数据驱动方法在自适应信号控制安全性优化中的应用”,提出了基于车联网数据的冲突类型建模方法,并探索了多车交互下的信号控制优化策略。

福州大学林薇博士后研究员演讲
同济大学叶欣辰博士介绍了“面向自动驾驶的高速公路适驾性研究”,构建了基于自动驾驶现实感知性能的高速公路适驾性评估模型,揭示了复杂道路交通环境对车道检测性能的影响机理,推动高速公路基础设施与自动驾驶技术融合发展。

同济大学叶欣辰博士演讲
同济大学刘倩博士分享了“面向自动驾驶的交叉口适驾性研究”,建立了基于自动驾驶安全视域的交叉口适驾性评估模型,解析了交叉口几何设计特征与感知失效的关系,为交叉口新建、改(扩)建和自动驾驶道路规划设计与管理提供了重要参考。

同济大学刘倩博士演讲
同济大学石若琳博士研究生介绍了“数字化交通规则引导自动驾驶轨迹规划研究”,针对交叉口左转场景中交通规则模糊、自动驾驶车辆决策困难的问题,提出了问题规则的数字化方法,并构建了更安全、更合规的轨迹规划方案,为优化自动驾驶车辆决策提供了依据。

同济大学石若琳博士研究生演讲
会议最后,第十届国际交通安全学术研讨会组织委员会主席南佛罗里达大学陈聪研究员、同济大学王雪松教授分别作总结,对参会专家的精彩发言和鼎力支持表示衷心感谢,并邀请专家来访同济大学进一步开展合作交流。参会专家高度肯定了研讨会的成果质量和学术价值,认为研讨会主题聚焦、内容精彩、交流深入,不仅展现了交通安全领域的最新研究成果,也为学者拓展研究深度和广度、深化合作提供了宝贵平台,共同推动了交通安全研究与应用的高质量发展,为全球交通安全治理贡献了智慧与力量。

南弗罗里达大学陈聪研究员作研讨会总结

同济大学王雪松教授作研讨会总结
同济大学自2010年起发起举办国际交通安全学术研讨会,至今已成功举办十届,为全球交通安全领域专家学者提供了长期交流合作的平台,为提升国际交通安全研究与应用水平带来积极深远的影响。